Versjon 2022.45.15
Utgitt 8. april 2023
FSD Beta v11.3.6
Inkludert i 2022.45.15
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
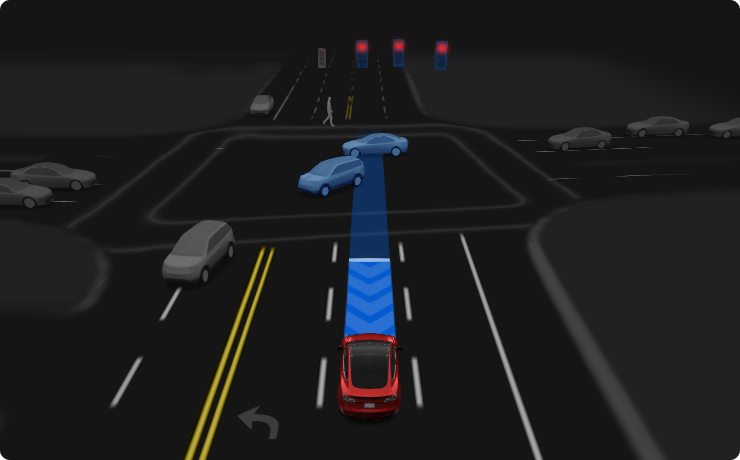
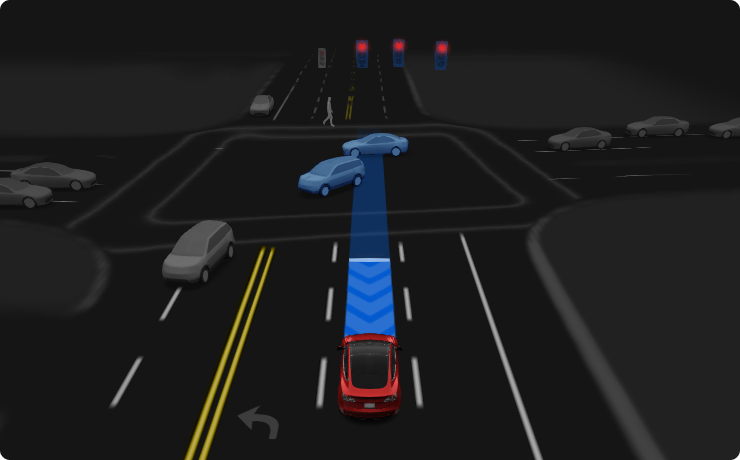
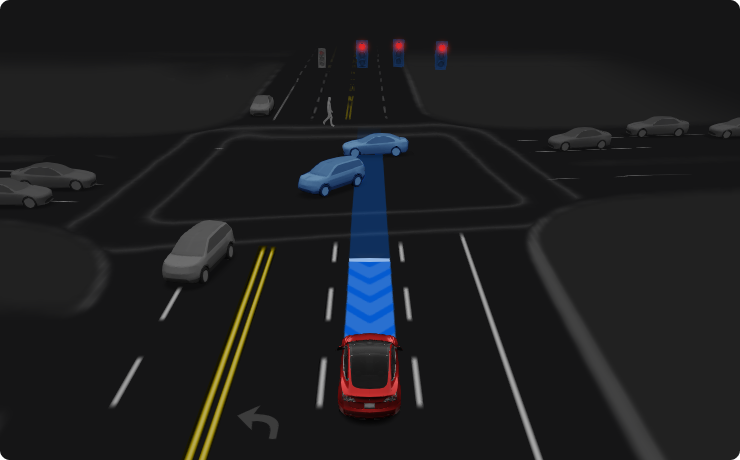
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
– Justert posisjon for automatisk blindsonekamera når FSD Beta er aktiv for å prioritere autopilotvisualiseringen. Dra kameraet for å lagre egendefinerte posisjoner.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.15
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.
FSD Beta v11.3.5
Inkludert i 2022.45.14
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
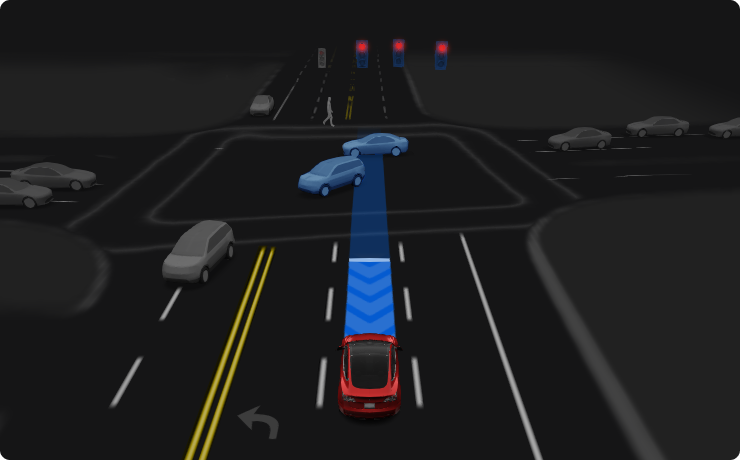
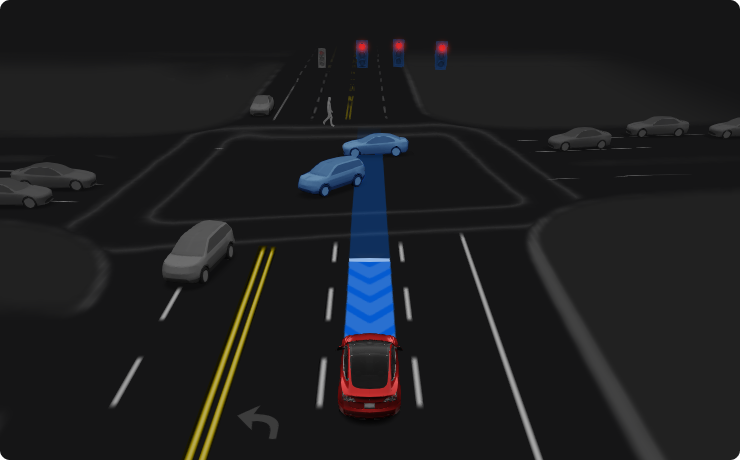
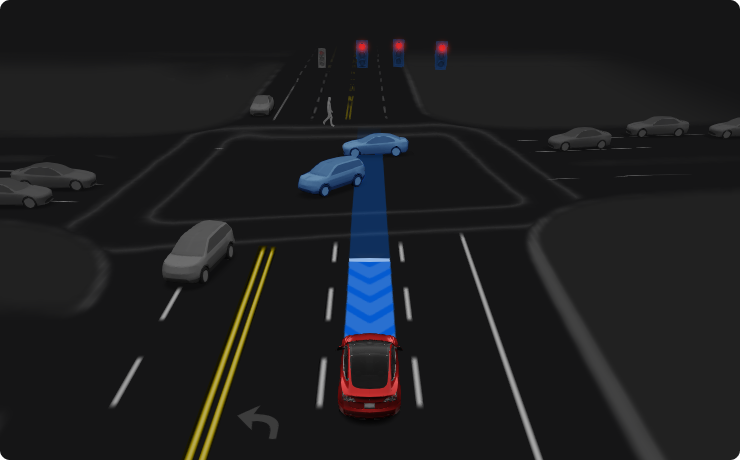
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
– Justert posisjon for automatisk blindsonekamera når FSD Beta er aktiv for å prioritere autopilotvisualiseringen. Dra kameraet for å lagre egendefinerte posisjoner.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.14
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.
FSD Beta v11.3.4
Inkludert i 2022.45.13
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
– Justert posisjon for automatisk blindsonekamera når FSD Beta er aktiv for å prioritere autopilotvisualiseringen. Dra kameraet for å lagre egendefinerte posisjoner.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.13
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.
FSD Beta v11.3.3
Inkludert i 2022.45.12
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
– Justert posisjon for automatisk blindsonekamera når FSD Beta er aktiv for å prioritere autopilotvisualiseringen. Dra kameraet for å lagre egendefinerte posisjoner.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.12
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.
FSD Beta v11.3.2
Inkludert i 2022.45.11
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
– Justert posisjon for automatisk blindsonekamera når FSD Beta er aktiv for å prioritere autopilotvisualiseringen. Dra kameraet for å lagre egendefinerte posisjoner.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.11
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.
FSD Beta v11.3.1
Inkludert i 2022.45.10
– Aktiverte FSD Beta på motorveier. Dette forener visjons- og planleggingsstakken på og utenfor motorveier, og erstatter den eldre motorveistakken, som er over fire år gammel. Den eldre motorveistakken er fortsatt avhengig av flere enkeltkamera- og enkeltbildenettverk, og ble konfigurert for å håndtere enkle filspesifikke manøvrer. FSD Betas flerkameravideonettverk og neste generasjons planlegger, som tillater mer komplekse agentinteraksjoner med mindre avhengighet av filene, gir plass til mer intelligent atferd, jevnere kontroll og bedre beslutningstaking.
– Forbedret gjenkalling av objekter i nærheten med 15 %, spesielt for store lastebiler og scenarier med høy girhastighet, gjennom ytterligere 30 000 automatisk merkede klipp utvunnet fra flåten. I tillegg utvidet og finjustert dedikert hastighetskontroll for objekter som havner i nærheten.
– Forbedret plasseringen av ego i brede kjørefelt ved å forskyve seg i retning av den kommende svingen for å tillate andre biler å manøvrere rundt ego.
– Forbedret håndtering i situasjoner med høy kurve eller store lastebiler ved å forskyve kjørefeltet for å opprettholde trygg avstand til andre kjøretøy på veien og øke komforten.
– Forbedret oppførsel for endringer i blokkerte kjørefelt i tett trafikk. Ego vil nå opprettholde mer avstand i blokkerte kjørefelt for å sikre mot mulige hull i tett trafikk.
- Forbedrede filskifter i tett trafikk ved å tillate høyere akselerasjon i justeringsfasen. Dette resulterer i mer naturlig valg av avstand for å forbikjøre kjøretøy i tilstøtende kjørefelt svært nærme ego.
– Gjorde svingene jevnere ved å forbedre deteksjonskonsistensen mellom kjørefelt, linjer og veikantforutsigelser. Dette ble oppnådd ved å integrere den nyeste versjonen av kjørefeltveiledningsmodulen i veikant- og linjernettverket.
– Forbedret nøyaktighet for å oppdage andre kjøretøys bevegelsessemantikk. Forbedret presisjon med 23 % for tilfeller der andre kjøretøy går over til kjøring, og redusert feil med 12 % for tilfeller der Autopilot feilaktig oppdager sitt ledende kjøretøy som parkert. Dette ble oppnådd ved å øke videokonteksten i nettverket, legge til mer data om disse scenariene og øke tapsstraffen for kontrollrelevante kjøretøy.
- Utvidet optimaliseringshorisont for maksimal bane, noe som resulterer i jevnere kontroll på veier med høy kurve og kjøretøy langt unna ved kjøring i motorveihastigheter.
- Forbedret kjøreatferd ved siden av en rekke parkerte biler i smale kjørefelt, der man foretrekker å forskyve og holde seg innenfor kjørefeltet i stedet for unødvendig å bytte fil eller sakke ned farten.
– Forbedrede filskiftemanøvrer etter hverandre gjennom bedre fusjon mellom synsbasert lokalisering og grove karttellinger av filene.
– Lagt til tekstforklaringer i brukergrensesnittet for å kommunisere kommende manøvrer som FSD Beta planlegger å gjøre. Visualiseringen av kommende nedbremsinger langs kjøretøyets bane er også forbedret. Vinkeltegn gjengis med varierende opasitet og hastighet for å indikere nedbremsingsintensiteten, og en heltrukket linje vises på steder der bilen vil stoppe.
– Forbedret gjenkalling og presisjon for objektdeteksjon, noe som særlig reduserte posisjonsfeilen for lastebiler med 10 %, økte gjenkalling og presisjon for kryssende kjøretøy over 100 m unna med henholdsvis 3 % og 7 %, og økte gjenkalling av motorsykler med 5 %. Dette ble oppnådd ved å implementere ytterligere kvalitetskontroller i vårt automatisk merkede datasett på to millioner videoklipp.
– Redusert falsk forskyvning rundt objekter i brede kjørefelt og nær kryss ved å forbedre modelleringen av objektkinematikk i lavhastighetsscenarier.
Tilbakekalling via internett (OTA)
Inkludert i 2022.45.10
I samsvar med en nylig tilbakekalling (kampanjenummer 23V085 for USA og nummer 2023-063 for Canada) forbedrer Tesla følgende spesifikke virkemåter i FSD Beta:
1. Forbedret beslutningslogikk for å kjøre gjennom eller stoppe ved bestemte gule lys ved å modellere beslutningen som et avveiningsrammeverk som tar hensyn til estimert: nedbremsing som kreves for å stoppe, tid til å kjøre inn i og ut av krysset, og tilbakelagt avstand over krysset før lyset går over til rødt. Dette bør gjøre håndteringen av gult lys mer naturlig og menneskelig.
2. Forbedret den langsgående nedbremsingsprofilen når man fører opp til stoppskiltkryss for å gjøre den generelle manøveren mer merkbar og naturlig.
3. Forbedret Teslas hastighetsjustering ved kjøring inn i bestemte fartssoner ved å tillate tidligere kontroll for oppdagede fartsgrenseskilt. Hvor effektiv responsen er når man senker farten for oppdagede fartsgrenseskilt bestemmes av gjeldende hastighet og dens forskjell i forhold til hastigheten som angis av det oppdagede skiltet. La til en visuell glød bak fartsgrenseikonet i brukergrensesnittet for å varsle føreren når kjøretøyets innstilte hastighet overstiger den oppdagede fartsgrensen med mer enn 50 %. Til slutt ble alternativet for en absolutt fartsgrenseforskyvning i FSD Beta fjernet; bare den prosentbaserte forskyvningen vil være tilgjengelig.
4. Oppdaterte virkemåten for visse scenarier der Teslaen kan manøvrere fra et svingfelt for å fortsette å kjøre rett frem. Disse manøvrene vil nå bli behandlet som et filskifte, der blinklyset brukes til å varsle andre sjåfører om Teslaens intensjon.
Som en påminnelse er føreren ansvarlig for kjøretøyets kjøring selv når FSD Beta er aktivert. Du må hele tiden holde øye med veien, holde hendene på rattet og være klar til å gripe inn for å opprettholde sikkerheten.